





Robots para la construcción
La robótica se abre camino en el sector
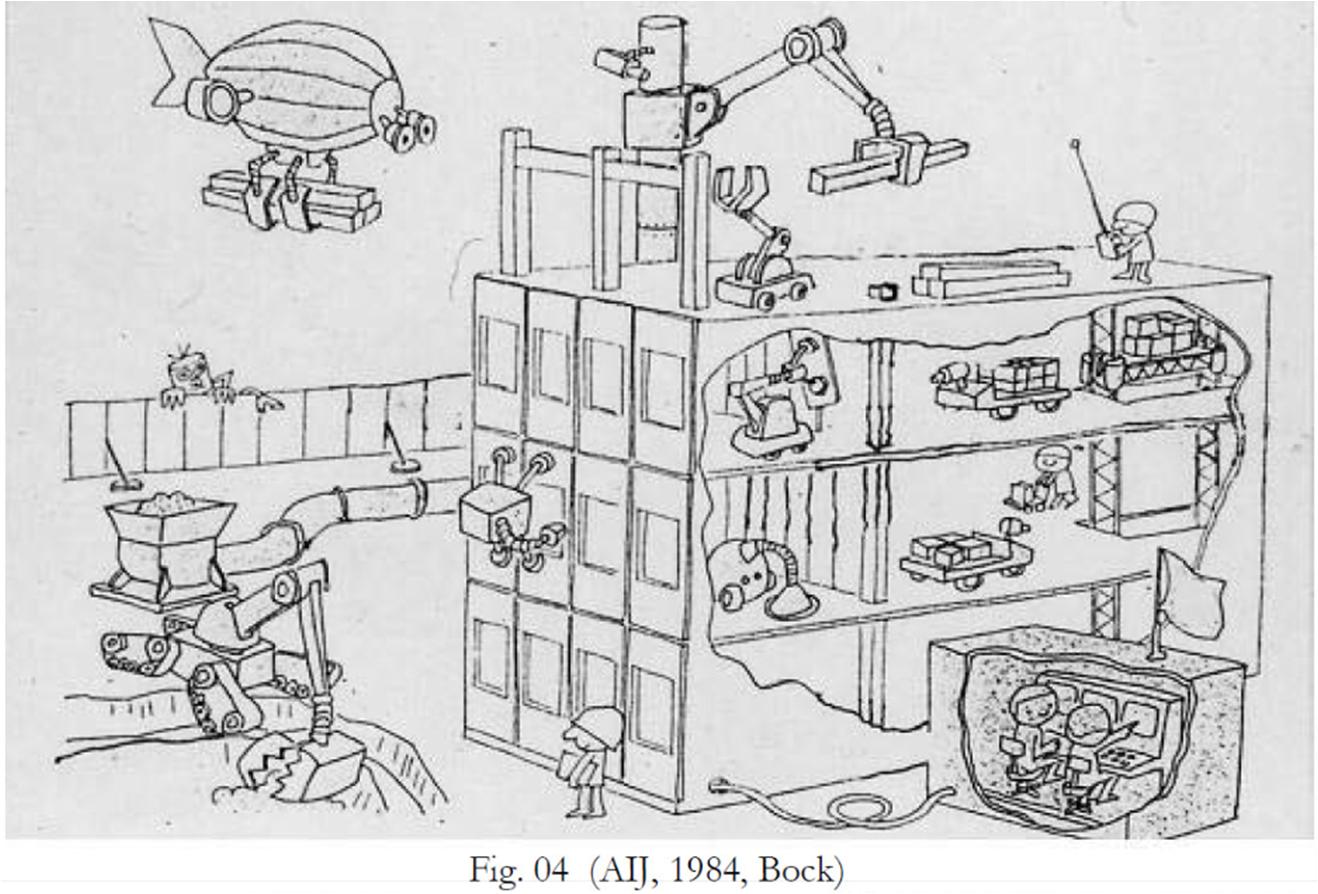
Han pasado muchos años ya desde que un joven Thomas Bock visionara un futuro de la construcción protagonizado por robots y automatismos [1]. Casi cuarenta años después de aquella premonición, la robótica empieza a tener presencia lentamente en el sector de la construcción. Pujante a nivel propositivo o conceptual y aún testimonial en el escenario real de una obra de construcción.
Tres factores están contribuyendo a ralentizar la incorporación de la robótica en el sector:
- Uno, relacionado con una legislación vigente que, al igual que ocurre con el coche autónomo, aún no da las suficientes garantías para introducir un robot en un proceso constructivo.
- Dos, la escasez de conocimiento y talento tecnológico en las organizaciones.
- Y, tres, una cultura empresarial reacia a incorporar nuevas formas de construir.
Sin embargo, la automatización de los procesos constructivos parece irrenunciable en un contexto social donde prima la eficiencia de los recursos naturales y la seguridad y el bienestar de los trabajadores. A este respecto, otros sectores industriales de tradición más fabril ya cuentan con un nivel de desarrollo robótico sustancial ofreciendo a la construcción un espejo donde mirarse.
El ecosistema de I+D nacional y europeo, especialmente el de más cercanía o especialización con el sector, ya cuenta con proyectos novedosos a nivel prototipo que ofrecen soluciones basadas en la robótica. Algunos ejemplos de ellos son los siguientes proyectos:
- El proyecto europeo BADGER que lidera la Universidad Carlos III y que está desarrollando un robot de microtunelación para construir infraestructuras sin zanjas.
- El proyecto ROBIM, formado por un gran consorcio nacional en el que ha participado ITAINNOVA, donde se ha desarrollado un sistema robótico autónomo para la inspección de edificios para su rehabilitación.
- El proyecto europeo HEPHAESTATUS donde un consorcio ha explorado diferentes conceptos de robots para aplicaciones innovadoras en la construcción.
Por otro lado, los departamentos de I+D de las grandes empresas constructoras ya han empezado a desarrollar proyectos de robótica, especialmente, relacionados con la robotización de la maquinaria móvil. Algunos ejemplos de estos proyectos:

Dúmper autónomo de Acciona 
Dúmper autónomo desarrollado por ITAINNOVA, VIAS, ANMOPYC y UNIZAR 
Volquete autónomo para obra civil de SACYR y CAVOSA 
Camión teleoperado desarrollado por TELERADIO y VOLVO
Ámbitos con desarrollos actuales en automatización y robótica
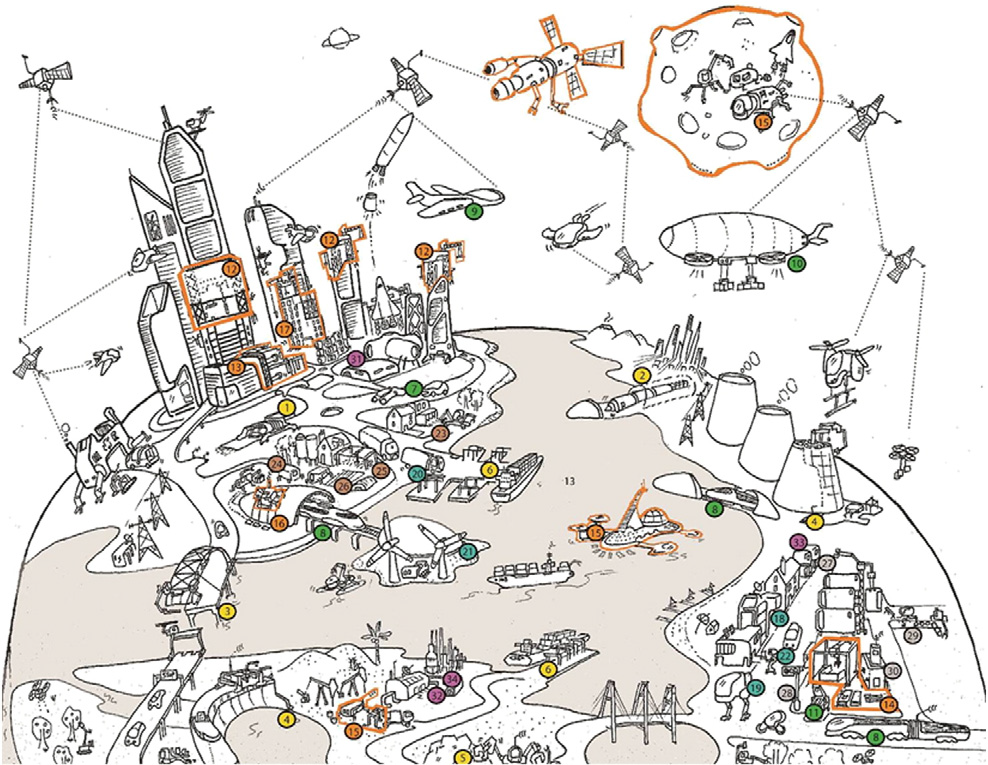
A nivel de generación de conocimiento y nuevos prototipos robóticos, actualmente hay una efervescencia industrial y son variadas y numerosas las iniciativas. De hecho, se están desarrollando robots para ámbitos y aplicaciones relacionadas con la construcción y para otros sectores industriales semejantes. La siguiente tabla, con ilustración incluida, es un resumen de ámbitos donde ya existen iniciativas incipientes o en desarrollo para la generación de robots:
| ÁMBITO TEMÁTICO | APLICACIÓN |
|---|---|
| – | – |
| Construcción de infraestructuras | |
| 1. Construcción de carreteras automatizada | |
| 2. Túneles automatizados (es decir, mediante tuneladoras) | |
| 3. Construcción de puentes automatizada | |
| 4. Construcción y deconstrucción automatizada de presas, centrales eléctricas,… | |
| 5. Minería automatizada | |
| 6. Puerto de contenedores automatizado | |
| Sistemas de transporte | |
| 7. Automóviles autónomos | |
| 8. Transporte público autónomo (U-Bahn, tren, etc.) | |
| 9. Viajes aéreos autónomos | |
| 10. Logística automatizada | |
| 11. Micromovilidad avanzada (es decir, HAL de Cyberdyne o i-Real de Toyota) | |
| Construcción de edificios | |
| 12. Construcción automatizada de edificios orientados verticalmente | |
| 13. Construcción automatizada de edificios orientados horizontalmente | |
| 14. Producción de viviendas | |
| 15. Nuevos mercados de la construcción: construcción en el espacio, mar y mar profundo, desierto, áreas árticas, etc. | |
| 16. Servicio y mantenimiento de edificios automatizados | |
| 17. Deconstrucción y re-personalización automatizadas | |
| Entornos automatizados | |
| 18. Automatización del hogar y la oficina | |
| 19. Tecnologías de asistencia y tecnologías del entorno humano | |
| 20. Instalaciones de producción y redes de suministro en red | |
| 21. Generación y distribución de energía inteligente | |
| 22. Robótica doméstica y de servicio | |
| Agricultura y producción de alimentos | |
| 23. Agricultura asistida por computadora / robótica | |
| 24. Puntales de ordeño robóticos | |
| 25. Instalaciones de producción de alimentos automatizadas | |
| 26. Comida personalizada | |
| Gestión de ciudades | |
| 27. Redes inteligentes | |
| 28. Control de tráfico automatizado / robótico | |
| 29. Inspección y mantenimiento de infraestructura automatizada / robótica | |
| 30. Gestión automatizada de suministros (agua, gas, mercancías, alimentos, etc.) | |
| Industria de fabricación en general | |
| 31. Fábricas digitales / cognitivas | |
| 32. Personalización masiva | |
| 33. Mini fábricas, fabricación en la nube | |
| 34. Logística celular | |
Una excavadora autónoma
En lo que se refiere a la divulgación científica, el estado del arte sigue creciendo con nuevas investigaciones relacionadas con el desarrollo de robots para aplicaciones constructivas. La última aportación importante de la academia es del grupo de investigación chino Baidu Research, en colaboración con la Universidad de Maryland, que ha desarrollado una excavadora autónoma capaz realizar tareas de carga de material durante 24 horas sin intervención humana y con altos rendimientos (ver vídeo).
La investigación ha sido publicada en la prestigiosa revista Sci Robotics y, según su autor principal, Dr. Zhang, «Este trabajo presenta una arquitectura robusta y eficiente que permite a excavadoras de varios tamaños realizar tareas de carga de material de forma autónoma».
Más allá del propio desarrollo tecnológico, la seguridad y salud ha sido un factor clave en este desarrollo. Derrumbes o corrimientos de tierra así como ambientes de trabajo muy nocivos por polvo y ruido favorecen alejar a las personas de esos entornos. Sólo en EEUU, hubo 200 accidentes graves con excavadoras en 2020.
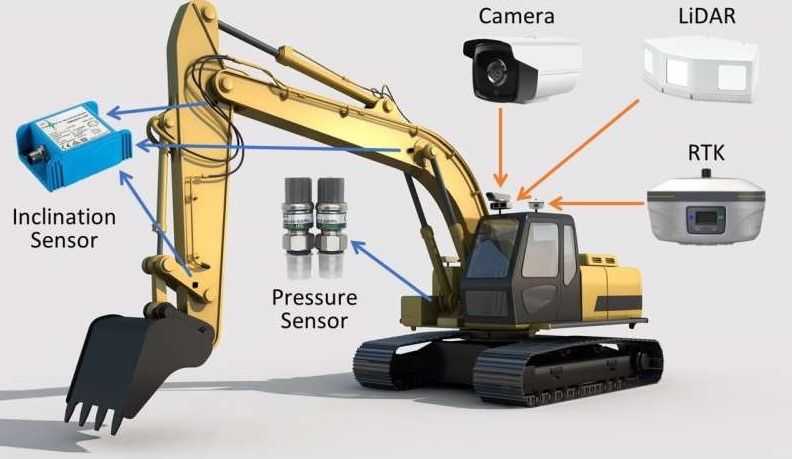
El reto tecnológico ha sido mayúsculo. Un robot excavadora debe resolver, al menos, los siguientes asuntos:
- Identificar los materiales.
- Esquivar los obstáculos.
- Entender los entornos cambiantes.
- Funcionar en condiciones adversas (obra).
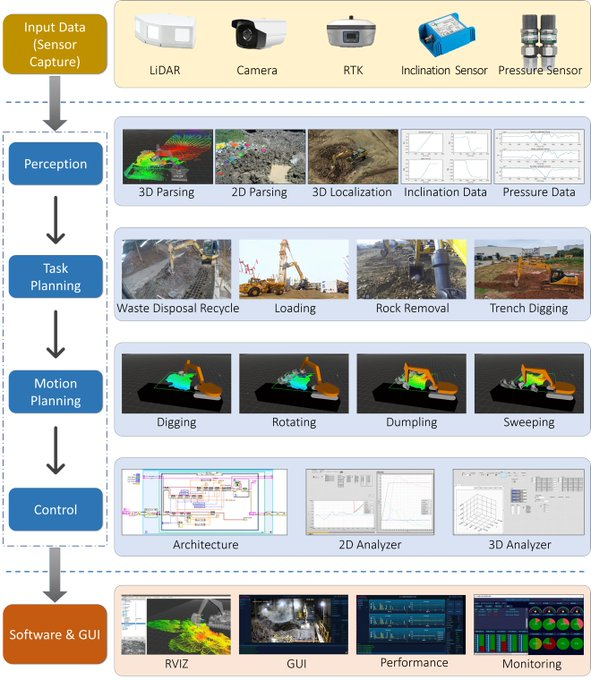
La solución a estas cuestiones se basan en algoritmos de Inteligencia Artificial que corren en tiempo real y que resuelven lógicas para la toma de decisiones en: (1) Percepción, (2) Localización, (3) Planificación, (4) Actuación y (5) Control. En la siguiente imagen se resume la arquitectura, desde el punto de vista de los retos tecnológicos a resolver, para el caso de la excavadora china:
Tipos de proyectos de robótica para la construcción.
Afrontar un proyecto de automatización de un proceso constructivo exige elegir el mejor enfoque. Es diferente robotizar una máquina ya existente que optar por un robot comercial y adaptarlo a una necesidad concreta.
Desde el punto de vista tecnológico, la robótica ofrece ya muchas alternativas para automatizar la construcción por lo que resulta crucial definir bien la necesidad para elegir la mejor opción disponible. En función del problema que se quiera resolver, el nivel de agregación tecnológica y el enfoque de la solución serán diferentes.
A continuación, se describen diferentes tipologías de proyectos donde la robótica aporta soluciones concretas al sector de la construcción incluyendo para cada tipo algún ejemplo real de aplicación:
Funcionalidades autónomas para maquinaria de construcción
Existen funcionalidades de una máquina de construcción que, por cuestiones de seguridad o eficiencia, puede resultar interesante dejarlas fuera del espacio de decisión del operario que maneja la máquina. Estas automatizaciones no tienen porqué sustituir al operario pero sí ofrecer ayuda en el caso de que cierta operación no esté siendo óptima o se desencadene una escena peligrosa.
Un ejemplo de este tipo de desarrollos son los sistemas de ayuda a la conducción para evitar atropellos en la maquinaria móvil. Existen soluciones que avisan al operario del riesgo de atropello o, incluso, con capacidad autónoma de detener la máquina en el caso de detectar un peligro de colisión. Ejemplo de ello es el sistema de asistencia inteligente para las cargadoras grandes sobre ruedas de Liebherr.
Robotización de maquinaria actual
La vida útil de las máquinas de construcción es dilatada en el tiempo y, en ocasiones, sucede que las necesidades actuales no son plenamente satisfechas por unas máquinas que fueron desarrolladas hace décadas. Es por ello que ha nacido una tendencia tecnológica denominada retrofitting que se basa en modificar la maquinaria actual, incorporándole nuevo hardware y software, con el fin de dotarla de autonomía.
Este tipo de desarrollos desembocan en máquinas que pueden ser teleoperadas o realizar su función de formar totalmente autónoma cuando en origen tenían que ser manejadas por un operario subido encima de ellas. El proyecto AUTODUMP, desarrollado en ITAINNOVA en colaboración con VIAS, la Universidad de Zaragoza y ANMOPYC, fue uno de los pioneros en esta línea.

Nuevos conceptos de máquinas robotizadas
Al contrario que sucede con la tipología de proyectos anterior, donde la máquina sufre una transformación posterior, están empezando a aparecer máquinas y vehículos de construcción que ya, desde su concepción, están diseñados como robots para realizar operaciones cien por cien autónomas. Los primeros prototipos fueron desarrollados por empresas nórdicas como VOLVO o SCANIA y estaban pensados para realizar funciones de trasiego de materiales a través de la conducción autónoma. Sin embargo, también existen ya ejemplos de otro tipo de maquinaria de construcción, que tradicionalmente se ha operado de forma manual, y que ya puede realizar su función de forma más eficiente y segura sin intervención directa de una persona como el caso de la Placa vibratoria autónoma de AMMANN.
Automatización proceso constructivo. Colaboración entre máquinas
Un paso natural y posterior a la incorporación de robots a los procesos constructivos es la colaboración y coordinación entre ellos. La secuenciación de procesos de forma automática y eficiente será viable si los equipos son capaces de “hablarse” entre ellos. Este reto comunicativo pone sobre la mesa varios retos tecnológicos fuertemente ligados con el mundo de la robótica. La empresa sueca VOLVO ya dispone de una mina en pruebas donde ha conseguido que palas cargadoras y dúmperes funcionen de forma autónoma y coordinada como una sola unidad de producción dentro de su ELECTRIC SITE RESEARCH PROJECT.
Colaboración operario – máquina robotizada.
En determinados procesos constructivos, la colaboración entre operarios y robots puede ser una solución innovadora y disruptiva. El ejemplo de la impresión 3D de hormigón es paradigmático para ilustrar este reto de convivencia entre humanos y máquinas. Mientras la impresora deposita las capas de material puede ser necesario que un operario vaya realizando funciones adicionales como la colocación de instalaciones (tuberías, redes…) o el acabado superficial. En términos de garantizar la seguridad para el operario presente en ese proceso robotizado, existen numerosos retos tecnológicos que resolver desde la perspectiva de la robótica como evitar posibles colisiones a través de la replanificación de trayectorias del robot. Es de prever que este tipo de proyectos sean necesarios a medida que vayan apareciendo robots en la obra.
Robots comerciales aplicados a la construcción
La empresa Boston Dynamics, además de sus humanoides bailarines, desarrolla robots para aplicaciones industriales. Son robots que proporcionar un hardware y un entorno de programación para desarrollar casos de uso en la industria. Este tipo de robots son comerciales y pueden ser de utilidad, por ejemplo, para funciones de seguimiento o monitorización de una obra de construcción. De hecho, ya existen aplicaciones en este sentido del perro SPOT que, con un LIDAR 360º acoplado al bastidor, es capaz de realizar mediciones en obra para su seguimiento, control y monitorización. (ver VIDEO)
Nuevos conceptos de robots para construcción
En ocasiones, las soluciones comerciales no ofrecen suficiente respuesta para cubrir una necesidad concreta dentro del sector de la construcción y es necesario desarrollar un robot conceptualmente de cero para resolverlo. Ejemplos de ello son los proyectos citados al comienzo de este post liderados por universidades o centros tecnológicos. El caso del proyecto ROBIM es un ejemplo paradigmático de esta motivación ya que, actualmente, las inspecciones de edificios previas a su rehabilitación suelen ser molestas y de baja calidad por su difícil accesibilidad. Para resolver este cuestión, se ha desarrollado un robot, en este caso un robot aéreo autónomo que incorpora hasta doce sensores para la diagnosis de envolventes, capaz de realizar las inspecciones de una forma eficiente, rápida y generando una información de calidad para proyectar la rehabilitación.

Referencias
(1) AIJ. Thomas Bock (1984)
(2) The future of construction automation: Technological disruption and the upcoming ubiquity of robotics. Thomas Bock (2015)

David Díez
ARTÍCULOS DEL MÍSMO ÁMBITO
-

-

(II) Cómo implantar la IA en la fabricación de maquinaria para la construcción: Guía práctica
Viernes, 15 Noviembre 2024
- Industria 4.0
OTROS ARTÍCULOS
-
-
Componentes del coche eléctrico: Desarrollo e implicaciones técnicas
Viernes, 24 Enero 2025
- Diseño y desarrollo de vehículos eficientes